仙台高等専門学校 准教授 博士(工学)大場譲
1 ハプティクスとは
ハプティクス(Haptics)とは日本語で「触覚学」の意味で、ハプティックデバイスを用いて人へ触覚・力覚を与える学問の総称である。コンピュータによる仮想技術、ロボットによる遠隔操作技術の発展とともに注目を浴びている技術となっている。
現在最も普及が進んでいるハプティックデバイスはゲーム機で用いるゲームコントローラである。ゲーム機においては仮想空間において発生する接触感触を振動によって操作者にフィードバックすることで皮膚感覚として触覚をユーザに与えることができる。これら振動による触覚再現は古くは1980年前後に初めてゲームセンターにある高額なゲームデバイスに採用され、1990年代中盤には家庭用ゲーム機にも採用されることによりほぼ全ての家庭環境に導入されている現状である。

それとは別にロボティクス技術の発展とともに人が直接現場で作業を行うことのできない極限環境下での作業をロボットに代替させる試みがなされている。例えば宇宙環境下での作業や、原子炉内部の調査などの人が生存できない環境での作業である。これら作業はロボットの自動運転での遂行は現状の技術では難しく、遠隔操縦ロボットを用いた人による作業を行うのが一般的である。これら遠隔操縦ロボットにおいては作業用ロボットが作業により受けた作業反力を操縦用ロボット操作する人の操作力に働きかけることで触覚を伝えることで作業効率を向上可能である。つまり操作者が動かす操作ロボットの位置と作業ロボットの位置を一致させながら、操作者の操作力と作業ロボットが受けた作業反力を合わせることにより感触を伝える力覚による触覚再現が重要な技術となる[1]。
2 力覚伝達の実現に向けた理想アクチュエータ
前述したような力覚実現の為の遠隔操縦ロボットシステムにおいては、操作用ロボットと作業用ロボット2台のロボットにおいてX,Y,Zの3次元空間での位置と力の一致が求められる。
これら3次元空間で位置と力を一致させるアクチュエータとしては、
● 回転型モータとボールねじを用いた方法
● 空気圧シリンダを用いた方法
● 油圧シリンダを用いた方法
などが存在するが、これらと比較してリニアモータの一種であるシャフトモータを用いた方法が力覚の再現に有意があり多くの研究者が用いている[2] [3] [4]。
以下にシャフトモータによる利点を示す。
3 シャフトモータによるハプティクス実現
3.1 高速位置決め性能
よりファインな力覚再現のためには2台のロボット間の位置決め性能に高速性が要求される。作業する人間の出せる最高速度は指の運動において7m/sec程度と言われており、これらを再現できるアクチュエータが求められる。一般的に油圧シリンダ、空気圧シリンダといったアクチュエータは速度が遅く、最高速度が1m/sec程度に制限される。
それに対しシャフトモータは6.5m/secの最高速度を実現でき、ほぼ人の運動と同性能を実現可能である。
3.2 高精度位置決め性能
力覚の認識には移動距離に対してどのくらいの反力が戻ってくるかで接触物体の硬さを認識可能である。そのため指定した位置にロボットが正確に移動する位置決め性能が求められる。
ボールねじはその構造上バックラッシが存在するため、その位置決め精度に限界が存在する。シャフトモータはバックラッシレスでありその位置決め精度は、モータシステムに付随するリニアエンコーダの分解能まで上げることが可能である。人間の触覚受容器のうち最も細かい運動を検知できるパチニ小体は100nmの閾値を持つが、市販されているエンコーダは5nmといった最大分解能を持つ物が存在するため十分な精度を確保可能である。
3.3 発生推力の高い線形性
作業ロボットが受けた作業反力を人が操作する操作ロボットのアクチュエータで高精度に再現することが良い触覚再現に繋がる。通常モータは供給電力に比例して発生力が増加するがその値にはばらつきが存在する。
シャフトモータは供給電流値とその発生推力に高い線形性を有しており、手元に力覚を再現するアクチュエータとして制御が容易である。
3.4 コギングレス、低速度リプル、バックラッシレス
良好な力覚伝達を行うためには全可動領域においてその運動を阻害するような要素を排除することが望ましい。通常のモータでは回転力を発生させるコイルをコア(鉄心)に巻き付けており、そのコアと永久磁石の吸引力が運動を阻害するコギングと呼ばれる現象を発生させる。特にハプティックデバイスにおいては物体との接触が多く速度0期間が長いことから、コギングの影響を大きく受ける。また接触運動の性質上低速度での運動期間が長いため速度リプルの影響を大きく受ける。シャフトモータはコアレス構造を取っているため、コギングトルクは非常に小さく、低速領域の速度リプルが低いことは良い接触力伝達に有利に働く。
また接触動作はその運動方向の切替が頻繁に起こり、ギアなどを用いたシステムにおいてはバックラッシュの影響を大きく受ける。バックラッシュはギアの空隙によりアクチュエータの発生力を対象に伝えることができない期間であるため大きな悪影響を及ぼす。シャフトモータはギアを用いずに動作するためこれらの影響を受けずに力覚再現が可能となる。
3.5 摩擦レス
摩擦は非線形な要素で運動を妨げる方向に働く力となる。アクチュエータの発生する力は摩擦で阻害されて対象に働きかけることになる。またロボットを操作する人間は摩擦分の力を余分に加えてロボットを動かすこととなる。よって摩擦力以下の力伝達を行う事が難しく、操作者はロボット2台分の摩擦力を操作者が感じることとなる。特に速度0となる接触動作を行う際には静止摩擦の影響を大きく受け触感に大きな悪影響を与える。
良く用いられる直動アクチュエータである回転モータとボールねじの組合せにおいては機械要素が多く、その接触面により大きな摩擦を生じることが知られている。これら摩擦は非線形であるためにその補償が難しく、触覚伝達アクチュエータとしては不向きである。それに対しシャフトモータは摩擦部品が少なくそれらの影響を受けづらいため良好な触覚伝達が可能となる。
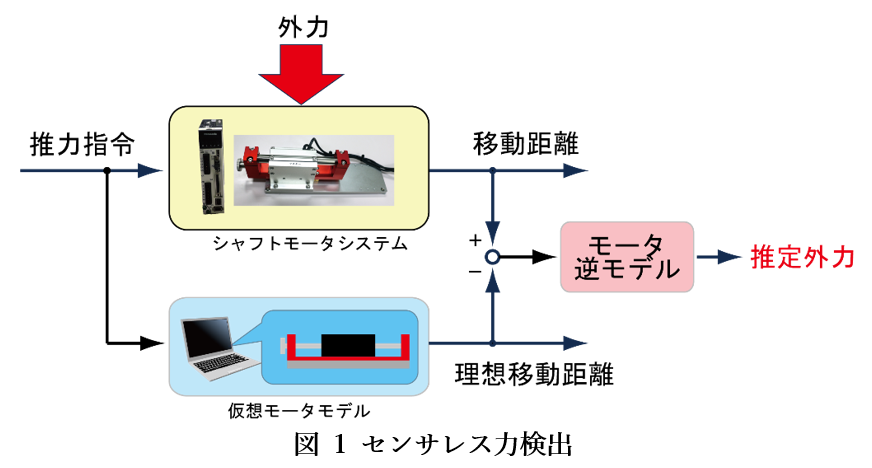
3.6 センサレス力検出
良い力覚伝達のためには2台のロボットの位置を一致させる位置制御と作業ロボットの反作用力と操作ロボットを操作する人の作用力を一致させる力制御性能が重要であり、その位置検出精度と力検出精度が鍵となる。
モータの位置検出にはエンコーダが一般的に用いられ、分解能が数十nm程度と十分な検出精度が得られる物が市販されている。
力検出には歪みゲージを用いた力覚センサを用いるのが一般的であるがその検出原理から広帯域に検出できるセンサの作成が難しく、市販品においてはノイズ除去のためのローパスフィルタを挿入するため力検出帯域が最大100~200Hz程度のものが多い。触覚受容器であるパチニ小体は1000Hz程度まで力覚を認知できると
言われているため市販の力センサでは性能不足と言える。
それら力センサの欠点を克服する方法として、産業界のモータ制御でよく使われる外乱オブザーバ[5]を力検出に用いて力検出帯域を向上する反力推定法が提案されている。本手法は実際のモータと同じ振る舞いをするモデルをコンピュータ内に実装し、実モータと仮想モータの動作の差を外力による物として力を検出する手法である。本手法において仮想モータのモデルはより簡単である方が検出精度が向上し、コギングレス、摩擦レス、バックラッシュレスであるシャフトモータを用いた際の力検出は2000Hz以上の帯域を得られる研究報告がなされている[5]。人体の認知周波数以上の力検出帯域を持つため良い力覚再現が可能となる。
動画
参考文献
(1) 実世界ハプティクス協同研究委員会: “実世界ハプティクスの最新技術”, 電気学会技術報告(2016) .
(2) 名取 賢二, 辻 俊明, 矢向 高弘, 大西 公平: ”ネットワークを介したバイラテラル遠隔操作”, 電学論D, Vol.126, No.2,pp.161–167, (2006).
(3) 山下 徹, 下野 誠通: ” 異構造型マスタ・スレーブシステムにおける力センサレスバイラテラル制御に関する一考察”, 電学論D, Vol.131, No.6,pp.777–784, (2011).
(4) 矢島 俊介, 桂 誠一郎: ”異質量マスタ・スレーブシステムにおけるモード空間オブザーバに基づく非干渉バイラテラル制御”, 電学論D, Vol.133, No.2,pp.172–180, (2013).
(5) 大石 潔, 大場 譲, 桂 誠一郎: ” 加速度制御に基づくモーションコントロールの運動学とダイナミクス”, 電学論D, Vol.127, No.6,pp.545–553, (2007).
(6) 入江 航平, 桂 誠一郎, 大石 潔: ” 位置・加速度入力型外乱オブザーバによる広帯域モーションコントロール”, 電学論D, Vol.127, No.6,pp.579–586, (2013).